MES Acuras Head (Auto Alignment Head)
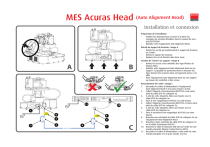
Installation et connexion
Préparation de l’installation
•
Veuillez lire attentivement et suivre à la lettre les
consignes de sécurité détaillées dans le manuel de sécurité R59770580
•
Déballez votre équipement Auto Alignment Head.
Retrait du support de livraison : Image A
•
Retirez les vis (8) qui maintiennent le support de livraison
sur l’unité.
•
Retirez le support de livraison.
•
Replacez les vis de fixation dans leurs trous.
A
B
11
V
10
1
8
V
9
2
3
4
5
6
7
C
Fixation de l’unité à un support : Image B
•
Retirez les écrous et les rondelles des tiges filetées de
fixation (M6).
•
Installez votre équipement Auto Alignment Head sur un
support : la goupille de positionnement et chacune des
tiges doivent être insérées dans un logement prévu à cet
effet.
•
Fixez l’équipement Auto Alignment Head sur son support
au moyen des rondelles et des écrous.
Raccordement de l’unité : Image C
1. Raccordez le cordon d’alimentation à l’équipement
Auto Alignment Head et à la prise murale à la fois.
2. Collez l’étiquette d’avertissement R870792 à une extrémité du câble SFTP de catégorie 5e.
3. À côté de cette étiquette, faites une boucle avec le
câble SFTP de catégorie 5e.
4. Fixez le tore magnétique B195382 sur cette boucle.
5. Collez l’étiquette d’avertissement R870792 à l’autre extrémité du câble SFTP de catégorie 5e.
6. À côté de cette étiquette, faites une boucle avec le
câble SFTP de catégorie 5e.
7. Fixez le deuxième tore magnétique B195382 sur cette
boucle.
8. Branchez une extrémité du câble SFTP de catégorie 5e sur
l’équipement Auto Alignment Head.
9. Branchez l’autre extrémité du câble SFTP de catégorie 5e
sur le câble d’extension USB LEX.
10. Branchez le câble d’extension USB LEX sur l’unité de commande principale (Master Control Unit ou MCU).
11. Raccordez le cordon d’alimentation à cette unité de commande principale et à la prise murale à la fois.
MES Acuras Head (Auto Alignment Head)
Guide de démarrage rapide
Présentation
Acuras permet de stocker les paramètres de luminosité et
de couleur pour chaque canal dans un ensemble de données
Golden Alignment après l’alignement complet d’un système de
visualisation confié à un expert professionnel Barco (capture),
puis de reproduire le plus fidèlement possible un « aspect »
Golden Alignment afin de corriger tout changement lié au
vieillissement des lampes, des filtres, etc. (réalignement). Les
points de mesure (positions) du spectromètre doivent être
définis préalablement à la réalisation d’une capture.
L’option AutoGeometry est utilisée pour extraire les coordonnées X et Y des angles de la zone visible de chaque canal de
visualisation (= capture). Vous devez définir les positions de la
caméra avant de réaliser une capture.
Mise en route
La procédure qui suit part de l’hypothèse que vous avez installé le logiciel XDS RACU et que le fichier de licence adéquat,
y compris les options Auto Alignment acquises lors de votre
achat, a été importé. Consultez le manuel d’utilisation et d’installation du logiciel XDS RACU (R59770508).
1. Mettez l’unité de commande principale (MCU) sous tension (appuyez sur le bouton ON/OFF) et patientez jusqu’à
son démarrage complet.
2. Mettez le système eRACU sous tension (appuyez sur le
bouton ON/OFF pendant deux secondes) et patientez
jusqu’à son démarrage complet.
3. Mettez votre équipement Auto Alignment Head sous
tension (interrupteur d’alimentation).
4. Connectez-vous à un système de visualisation.
5. Basculez en niveau d’accès utilisateur Administrator.
6. Choisissez un projecteur ou un groupe de projecteurs.
7. Recherchez les plugins disponibles : sélectionnez Options > Add/Remove Device > Plugin Management, puis
cliquez sur Apply.
8. Cliquez sur Reset Gimbal dans la page Position > Position
Gimbal/Panel Position Marker pour réinitialiser le support
à cardan.
Configuration : emplacement de la tête
Capture et réalignement du Acuras
Si une ou plusieurs régions de l’image projetée sont en dehors
de Ia portée de votre appareil Auto Alignment Head, plusieurs
positions physiques peuvent être définies.
Des positions supplémentaires peuvent être définies en
regard de l’option Default Location qui détermine la position
par défaut. Pour cela, sélectionnez Options > Auto Alignment >
General > Measurement Head Location.
CAPTURE
1. Créez/activez un jeu Auto Alignment de votre choix.
2. Corrigez les niveaux de gris (option GLC) sur tous les
canaux à partir de la page Adjust Gray Scale.
3. Procédez à un alignement complet du système de visualisation.
4. Cliquez sur Reset Gimbal dans la page Position > Position
Gimbal/Panel Position Marker pour réinitialiser le support
à cardan.
5. Dans la page Acuras, cliquez sur Start Capture pour lancer
la capture.
RÉALIGNEMENT
1. Activez le jeu Auto Alignment désiré pour lequel la capture a été exécutée.
2. Cliquez sur Reset Gimbal dans la page Position > Position
Gimbal/Panel Position Marker pour réinitialiser le support
à cardan.
3. Dans la page Acuras, cliquez sur Start Capture pour lancer
la capture.
Configuration : position du Acuras
Pour chaque canal de visualisation, un (Acuras 1-point) ou
plusieurs (Acuras Multi-point) points de mesure doivent être
définis dans la page Position :
•
Acuras 1-point : utilisez le pointeur laser pour indiquer le
centre de chaque canal et enregistrer ces positions.
•
Acuras Multi-point :
1. Les quatre angles extérieurs et le point central de la
zone visible de chaque canal doivent être signalés
(= marqueur de panneau) et enregistrés.
2. Servez-vous du pointeur laser pour indiquer le point
de mesure de chacun des marqueurs de panneau
et enregistrer ces positions (= centre de cardan et
angles de cardan). Le logiciel XDS RACU calculera
quatre points de mesure supplémentaires (au
centre de chaque côté des canaux). L’un de ces
quatre points peut rester indéfini.
Configuration : ajustement géométrique
automatique
Les positions de la caméra (vues en direct de la caméra) doivent être définies de sorte que chaque angle de la zone visible
de chaque canal figure dans une position au minimum. Les
types de position sont les suivants :
•
Without Blend Zone : si une position inclut uniquement
des canaux qui ne se chevauchent pas.
•
With Blend Zone : si une position comprend des canaux
qui se chevauchent.
•
HUD : pour définir les angles de l’image HUD par rapport
aux canaux en arrière-plan sur lesquels cette image
apparaît.
CAPTURE (si aucune position est de type HUD)
1. Cliquez sur Reset Gimbal dans la page Position > Position
Gimbal/Panel Position Marker pour réinitialiser le support
à cardan.
2. Dans la page AutoGeometry, cliquez sur Capture.
CAPTURE (si une position au moins est de type HUD)
1. Cliquez sur Reset Gimbal dans la page Position > Position
Gimbal/Panel Position Marker pour réinitialiser le support
à cardan.
2. Vérifiez que tous les projecteurs obtiennent une image
noire de leur dispositif de génération d’images (IG) et
que le projecteur HUD dévoile un rectangle blanc plein
dans la zone HUD concernée du dispositif IG.
3. Dans la page AutoGeometry, cliquez sur Capture.
Remarques importantes
•
•
Vous trouverez plus d’informations détaillées sur les procédures décrites ci-après dans le manuel d’utilisation et d’installation Auto Alignment (R59770509).
www.barco.com
Capture (AutoGeometry)
Vous devez systématiquement réinitialiser le support
à cardan après la mise sous tension de votre appareil
Auto Alignment Head.
Aucune lumière parasite n’est autorisée au cours d’une
capture ou d’un réalignement.
Division Barco Simulation
Noordlaan 5, B-8520 Kuurne, Belgique
www.barco.com
R59770598FR_02
18 mars 2011
">